VLSOT
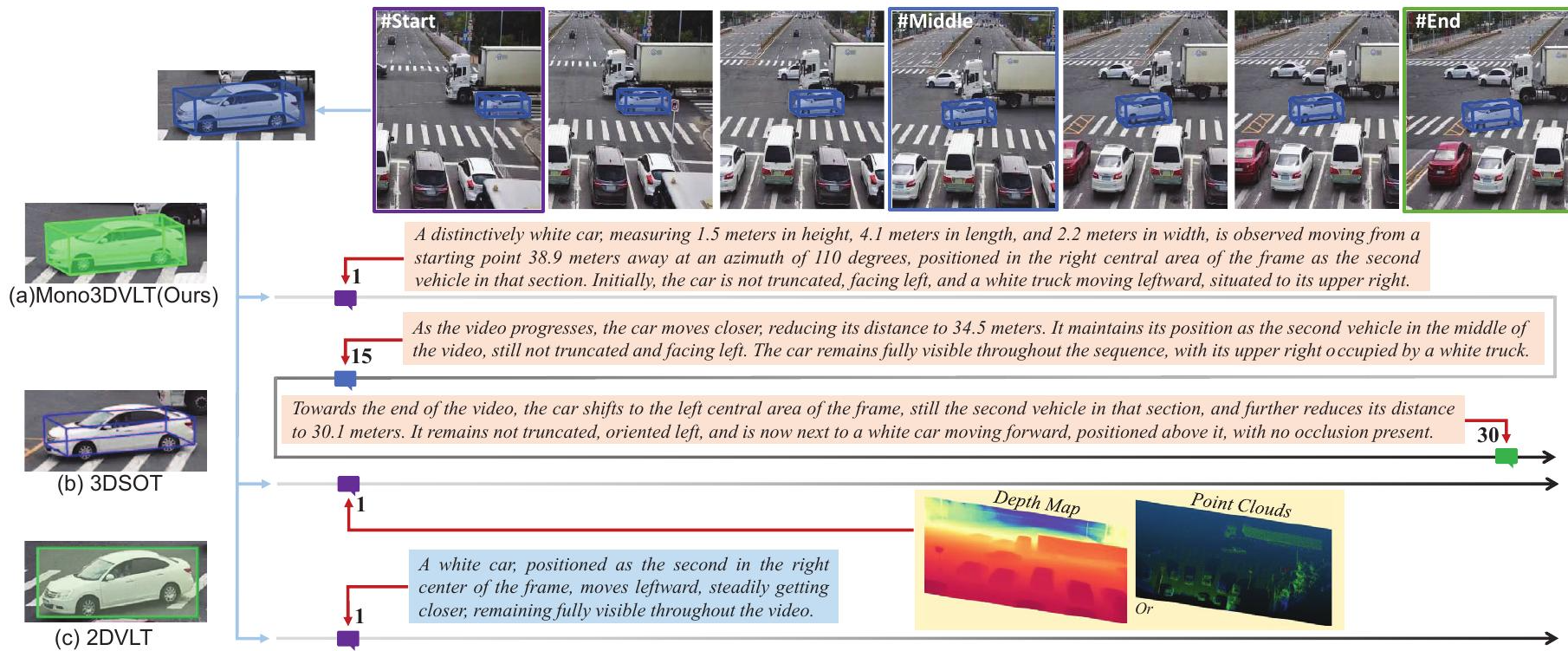
Monocular-Video-Based 3D Visual Language Tracking
- Visual-Language Tracking (VLT) is an emerging paradigm that bridges the human-machine performance gap by integrating visual and linguistic cues, extending single-object tracking to text-driven video comprehension.
- However, existing VLT research remains confined to 2D spatial domains, lacking the capability for 3D tracking in monocular video—a task traditionally reliant on expensive sensors (e.g., point clouds, depth measurements, radar) without corresponding language descriptions for their outputs.
- The code are publicly available (https://github.com/astudyber/Mono3DVLT), advancing low-cost monocular 3D tracking with language grounding.
Submission Guidelines
Mono3DVLT-V2X Dataset : By applying, you can obtain the download link for the annotation file corresponding to the dataset. To avoid infringement, please obtain the images corresponding to the dataset from the V2X-Seq dataset: "V2x-seq: A large-scale sequential dataset for vehicle-infrastructure cooperative perception and forecasting." You can also download it through the following link: https://drive.google.com/file/d/1VwiXsNXHAeeCT5STIPesWX2w3UT-6x7B/view?usp=sharing
3D Object Detection Prediction File Format Specification
3D Object Detection Prediction File Format Specification
1. File Naming Rule
The prediction files must be named according to the following format:
{sampleID}_pred_box0_.txt
Example:
sample001_pred_box0_.txt, car_003_pred_box0_.txt
2. File Content Format
Each file should contain 30 lines, with each line representing the prediction result for one frame:
1 l w h x y z 2 l w h x y z 3 l w h x y z ... 30 l w h x y z
Format Description
| Column | Content | Description |
|---|---|---|
| 1st Column | 1–30 |
Frame index (from 1 to 30) |
| 2nd–7th Columns | l w h x y z |
3D bounding box coordinates |
3. Coordinate Requirements
- Data Type: Floating-point numbers, preferably with four decimal places
- Unit: Meters (m)
- Coordinate System: 3D world coordinate system
Note: Use a period (
.) as the decimal separator. Do not use commas (,).
4. Example File Content
1 0.0413 0.0061 0.3771 0.4055 -0.2095 0.2607 2 0.0421 0.0060 0.3745 0.4040 -0.2057 -0.2586 3 0.0423 0.0060 0.3760 -0.4028 -0.2031 0.2531 4 0.0434 0.0060 0.3736 0.4024 0.2010 -0.2514 5 0.0441 0.0060 0.3724 -0.4011 0.1982 -0.2453 ... 30 0.0605 0.0056 0.3588 0.3789 -0.1567 -0.1814
5. Folder Structure
The submitted prediction results should be organized as follows:
result/
├── 000237.txt
├── 001483.txt
├── 003235.txt
└── ...
├── 000237.txt
├── 001483.txt
├── 003235.txt
└── ...
Recommendation: Compress the entire folder into a ZIP file before submission. Example:
submission_result.zip
Method Leaderboard
12 Methods
6 Metrics
This leaderboard shows methods that are online and have submitted results. Methods are ranked based on their performance metrics.
| Method | SR@0.5 Higher is better | SR@0.7 Higher is better | AOR Higher is better | PR@1.0 Higher is better | ACE Lower is better | PR@0.5 Higher is better |
|---|---|---|---|---|---|---|
|
Last submission: 2025-08-07
|
81.6300 | 68.9400 | 85.1200 | 81.5600 | 0.5210 | 62.3600 |
| Wei, Hongkai, Yang, Yang, Sun, Shijie, Feng, Mingtao, Song, Xiangyu, Lei, Qi, Hu, Hongli, Wang, Rong, Song, Huansheng, Akhtar, Naveed, others, Mono3DVLT: Monocular-Video-Based 3D Visual Language Tracking. In Proceedings of the Computer Vision and Pattern Recognition Conference, 2025. | ||||||
|
Last submission: 2025-08-31
|
71.7500 | 63.4700 | 79.1300 | 75.8900 | 0.5940 | 58.9100 |
| Zhan, Yang, Yuan, Yuan, Xiong, Zhitong, Mono3dvg: 3d visual grounding in monocular images. In Proceedings of the AAAI Conference on Artificial Intelligence, 2024. | ||||||
|
Last submission: 2025-08-31
|
61.4000 | 51.7000 | 68.3100 | 70.4300 | 0.6970 | 53.6300 |
| Zhou, Li, Zhou, Zikun, Mao, Kaige, He, Zhenyu, Joint visual grounding and tracking with natural language specification. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023. | ||||||
|
MMT3DVG
Open Source
Last submission: 2025-11-24
|
60.6667 | 42.6667 | 52.2601 | 40.3333 | 1.7716 | 15.3333 |
|
Last submission: 2025-08-31
|
54.5000 | 41.6200 | 58.6200 | 66.7800 | 0.7830 | 47.5600 |
| Deng, Jiajun, Yang, Zhengyuan, Chen, Tianlang, Zhou, Wengang, Li, Houqiang, Transvg: End-to-end visual grounding with transformers. In Proceedings of the IEEE/CVF international conference on computer vision, 2021. | ||||||
|
Last submission: 2025-08-31
|
50.3300 | 38.4100 | 53.4300 | 68.5200 | 0.7920 | 47.5600 |
| Yang, Zhengyuan, Chen, Tianlang, Wang, Liwei, Luo, Jiebo, Improving one-stage visual grounding by recursive sub-query construction. In European conference on computer vision, 2020. | ||||||
|
Last submission: 2025-08-31
|
37.2900 | 25.3700 | 40.6900 | 37.4100 | 1.1320 | 16.3000 |
| Sadhu, Arka , Chen, Kan , Nevatia, Ram , Zero-Shot Grounding of Objects From Natural Language Queries. In IEEE, 2020. | ||||||
|
Last submission: 2025-08-31
|
35.4300 | 29.6200 | 41.1800 | 43.4000 | 1.0590 | 25.3200 |
| Yang, Sibei , Li, Guanbin , Yu, Yizhou , Dynamic Graph Attention for Referring Expression Comprehension. In IEEE, 2019. | ||||||
|
Last submission: 2025-11-24
|
0.0000 | 0.0000 | 0.0000 | 0.0000 | 41.4169 | 0.0000 |
|
对对队的
Open Source
Last submission: 2025-11-24
|
0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
|
对对队
Open Source
Last submission: 2025-11-24
|
0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
|
UAVision
Open Source
Last submission: 2025-11-24
|
0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |